Chain Root -> Joint0 -> Joint1 -> Effectorという形で構成されています。
Chain RootとEffectorの位置を決定することによりJoint0、Joint1の変換マトリクスを求めます。
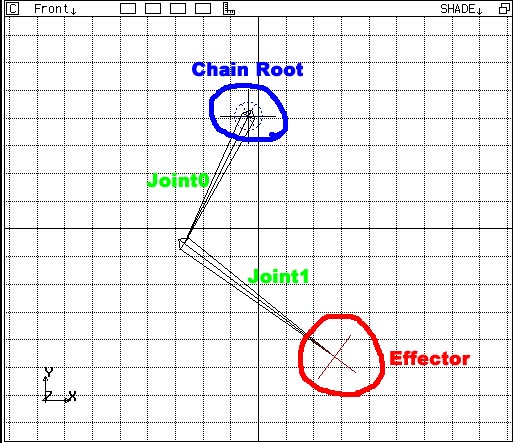
図 2Bone IK

図 Jointの軸
この平面は基本的には下図のようなJoint0のZ軸を法線とし、joint0の原点を通る平面です。
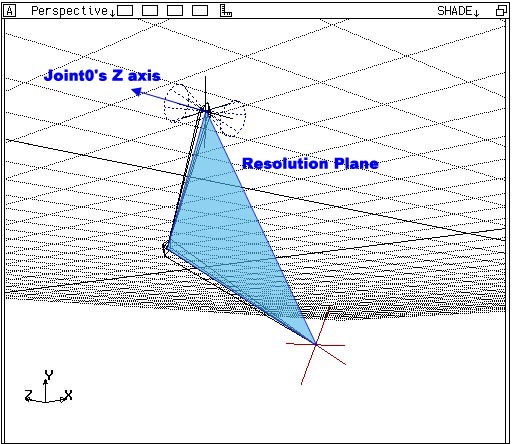
図 Resolution Plane
下図のように変更されたレゾリューション・プレーンの軸を指定することで、本来のIKの動作を歪めることができます。
この場合、Joint0にPreferred Axis ConstraintやUp Vector Constraintをかけると、Constraintするオブジェクトは本来のレゾリューション・プレーンを決定し、Joint0、Joint1は変更されたレゾリューション・プレーン上で動作します。
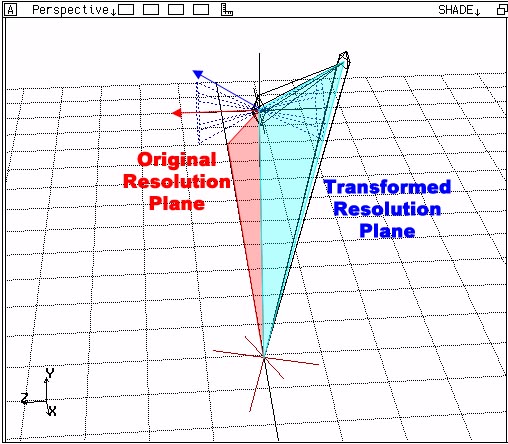
図 Resolution Planeの変更
一つはNIFF2_JOINT_UPフラグがJoint0に設定されている場合です。この場合、下図のようにJoint0のY軸の向きにEffectorが移動した場合にIKは「曲がる」動作をします。
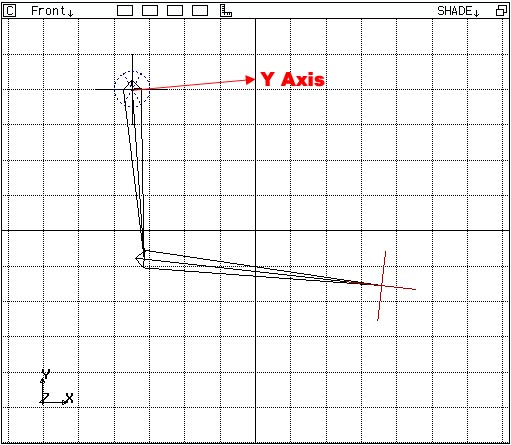
図 NIFF2_JOINT_UP指定時
逆にNIFF2_JOINT_DOWNフラグがJoint0に設定されている場合は下図のようにJoint0のY軸と逆の向きにEffectorが移動した場合にIKが「曲がり」ます。

図 NIFF2_JOINT_DOWN指定時